반응형
visdom이란?
데이터 시각화를 window창으로 보여주는 package
visdom 설치
!pip install visdom
!python -m visdom.server위 코드를 실행하면 http://localhost:8097/ 에 visdom 화면이 생성된다.

실습
import torch
import torch.nn as nn
import torchvision
import torchvision.datasets as dsetsimport visdom
import visdom
vis = visdom.Visdom()Text
vis.text("Hello. world", env = "main") ## env = main이라는 환경에 창을 띄움
image
a = torch.randn(3,200,200)
vis.image(a)
RGB가 random하게 있는 200x200이미지 출력
images
vis.images(torch.Tensor(3, 3, 28, 28))
28x28 3개이미지 동시 출력
example(using MNIST and CIFAR10)
MNIST = dsets.MNIST(root="./MNIST_data",
train = True,
transform=torchvision.transforms.ToTensor(),
download=True)
cifar10 = dsets.CIFAR10(root="./cifar10",
train = True,
transform=torchvision.transforms.ToTensor(),
download=True)CIFAR10
data = cifar10.__getitem__(0)
print(data[0].shape)
vis.images(data[0],env="main")
CIFAR10 첫번째 data 그림 출력(두꺼비)
MNIST
data = MNIST.__getitem__(0)
print(data[0].shape)
vis.images(data[0],env="main")
MNIST 첫번째 이미지 출력
Check dataset
## batch sise 만큼 가져오기
data_loader = torch.utils.data.DataLoader(dataset = MNIST,
batch_size = 32,
shuffle = False)for num, value in enumerate(data_loader):
value = value[0]
print(value.shape)
vis.images(value)
break
32개의 데이터가 동시 출력
## 창 닫기
vis.close(env = "main") ## env = main인 모든 창이 닫힘
Line Plot
x값을 넣지 않으면 x 값은 0에서 1까지로 생긴다.
Y_data = torch.randn(6)
plt = vis.line(Y = Y_data) ## x가 없으면 x은 무조건 0에서 1까지X_data = torch.Tensor([1,2,3,4,5,6])
plt = vis.line(Y=Y_data, X=X_data)
Line update
기존에 있는 창에 새 점을 연결하는 것
Y_append = torch.randn(1)
X_append = torch.Tensor([7])
vis.line(Y=Y_append, X=X_append, win=plt, update='append')
multiple Line on single windows
num = torch.Tensor(list(range(0,10)))
print(num.shape)
num = num.view(-1,1)
print(num.shape)
num = torch.cat((num,num),dim=1)
print(num.shape)
plt = vis.line(Y=torch.randn(10,2), X = num)
>>>
torch.Size([10])
torch.Size([10, 1])
torch.Size([10, 2])
Line info
## title : 그래프 이름쓰기
plt = vis.line(Y=Y_data, X=X_data, opts = dict(title='Test', showlegend=True))## legend : 선 정보 입력
plt = vis.line(Y=Y_data,
X=X_data,
opts = dict(title='Test', ## 제목
legend = ['1번'], ## legend
showlegend=True)
)plt = vis.line(Y=torch.randn(10,2),
X = num,
opts=dict(title='Test',
legend=['1번','2번'],
showlegend=True)
)
make function for update line
## loss function 그래프 그리기 위해
def loss_tracker(loss_plot, loss_value, num):
'''num, loss_value, are Tensor'''
vis.line(X=num,
Y=loss_value,
win = loss_plot,
update='append'
)plt = vis.line(Y=torch.Tensor(1).zero_())
for i in range(500):
loss = torch.randn(1) + i
loss_tracker(plt, loss, torch.Tensor([i]))## 창 닫기
vis.close(env = "main")
MNIST-CNN with visdom
import torch
import torch.nn as nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
import torch.nn.initimport visdom
vis = visdom.Visdom()
vis.close(env="main")def loss_tracker(loss_plot, loss_value, num):
'''num, loss_value, are Tensor'''
vis.line(X=num,
Y=loss_value,
win = loss_plot,
update='append'
)device = 'cuda' if torch.cuda.is_available() else 'cpu'
torch.manual_seed(777)
if device =='cuda':
torch.cuda.manual_seed_all(777)#parameters
learning_rate = 0.001
training_epochs = 15
batch_size = 32#MNIST dataset
mnist_train = dsets.MNIST(root='MNIST_data/',
train = True,
transform=transforms.ToTensor(),
download=True)
mnist_test = dsets.MNIST(root='MNIST_data/',
train=False,
transform = transforms.ToTensor(),
download=True)data_loader = torch.utils.data.DataLoader(dataset=mnist_train,
batch_size = batch_size,
shuffle =True,
drop_last=True)class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1,32,kernel_size=3, stride=1, padding=1),
nn.ReLU(),
nn.MaxPool2d(2)
)
self.layer2 = nn.Sequential(
nn.Conv2d(32,64, kernel_size=3, stride=1, padding=1),
nn.ReLU(),
nn.MaxPool2d(2)
)
self.layer3 = nn.Sequential(
nn.Conv2d(64,128, kernel_size=3, stride=1, padding=1),
nn.ReLU(),
nn.MaxPool2d(2)
)
self.fc1 = nn.Linear(3*3*128, 625)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(625, 10, bias =True)
torch.nn.init.xavier_uniform_(self.fc1.weight)
torch.nn.init.xavier_uniform_(self.fc2.weight)
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = self.layer3(out)
out = out.view(out.size(0), -1)
out = self.fc1(out)
out = self.relu(out)
out = self.fc2(out)
return outmodel = CNN().to(device)
value = (torch.Tensor(1,1,28,28)).to(device)
print( (model(value)).shape )criterion = nn.CrossEntropyLoss().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr = learning_rate)loss_plt = vis.line(Y=torch.Tensor(1).zero_(),
opts=dict(title='loss_tracker',
legend=['loss'],
showlegend=True)
)Train with loss_tracker
#training
total_batch = len(data_loader)
for epoch in range(training_epochs):
avg_cost = 0
for X, Y in data_loader:
X = X.to(device)
Y = Y.to(device)
optimizer.zero_grad()
hypothesis = model(X)
cost = criterion(hypothesis, Y)
cost.backward()
optimizer.step()
avg_cost += cost / total_batch
print('[Epoch:{}] cost = {}'.format(epoch+1, avg_cost))
loss_tracker(loss_plt, torch.Tensor([avg_cost]), torch.Tensor([epoch]))
print('Learning Finished!')
>>>
[Epoch:1] cost = 0.1199251338839531
[Epoch:2] cost = 0.04109795391559601
[Epoch:3] cost = 0.027864443138241768
[Epoch:4] cost = 0.022573506459593773
[Epoch:5] cost = 0.018547339364886284
[Epoch:6] cost = 0.015445930883288383
[Epoch:7] cost = 0.010787862353026867
[Epoch:8] cost = 0.011658226139843464
[Epoch:9] cost = 0.008654269389808178
[Epoch:10] cost = 0.009108899161219597
[Epoch:11] cost = 0.009518935345113277
[Epoch:12] cost = 0.0069547598250210285
[Epoch:13] cost = 0.007706377189606428
[Epoch:14] cost = 0.00818073283880949
[Epoch:15] cost = 0.005866056773811579
Learning Finished!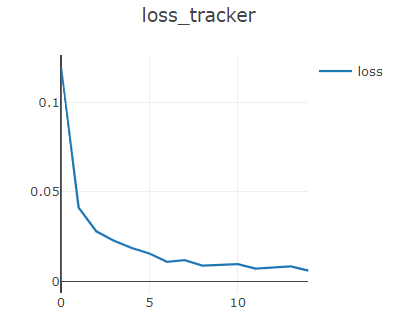
with torch.no_grad():
X_test = mnist_test.test_data.view(len(mnist_test), 1, 28, 28).float().to(device)
Y_test = mnist_test.test_labels.to(device)
prediction = model(X_test)
correct_prediction = torch.argmax(prediction, 1) == Y_test
accuracy = correct_prediction.float().mean()
print('Accuracy:', accuracy.item())
>>>
Accuracy: 0.9635999798774719반응형
'AI Study > DL_Basic' 카테고리의 다른 글
| [파이토치로 시작하는 딥러닝 기초]10.4_Advance CNN(VGG) (0) | 2021.01.07 |
|---|---|
| [파이토치로 시작하는 딥러닝 기초]10.3 ImageFolder / 모델 저장 / 모델 불러오기 (0) | 2021.01.04 |
| [파이토치로 시작하는 딥러닝 기초]10.1_Convolutional Neural Network (0) | 2020.12.30 |
| [파이토치로 시작하는 딥러닝 기초]07_MLE, Overfitting, Regularization, Learning Rate (0) | 2020.12.28 |
| [파이토치로 시작하는 딥러닝 기초]06_Softmax Classification (0) | 2020.12.28 |